| |
Themenvorschlag für eine Abschlussarbeit
Konzeption und Realisierung einer Nahbereichsnavigation eines autonomen mobilen Robots
Autonome mobile Robots sollen sich in unbekannter Umgebung orientieren und dort einfache Aufgaben übernehmen.
Neben der Kartografierung einer unbekannten Umgebung ist die Navigation hierbei ein Hauptproblem. Hier unterscheidet man zwischen
der globalen Navigation und der Nahbereichsnavigation. Während sich die globale Navigation mit Aufgaben wie beispielsweise
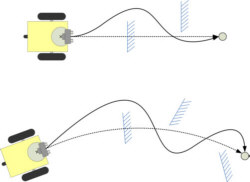
"fahre in die linke nördliche Raumecke" befasst, sollen durch die Nahbereichsnavigation nahe Teilziele angesteuert werden. Dabei stehen die Umfahrung
von nicht-kartografierten oder spontan auftretende Hindernisse im Vordergrund.
Eine Umfahrung soll dabei möglichst energie- oder zeiteffizient erfolgen und verlässt sich dabei auf unvollständige und ungenaue Sensorinformationen.
In dieser Arbeit soll eine Nahbereichsnavigation konzipiert und realisiert werden. Einige Randbedingungen sind hierbei:
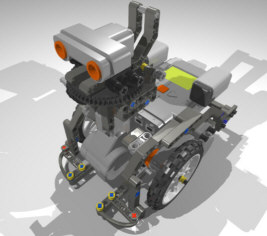
- Der Robot-Aufbau ist im Wesentlichen vorgegeben (siehe Abbildung).
- Der Robot verfügt über interne Positionssensoren (Messung der Radumdrehung) und besitzt als wesentliche Hinderniserkennung einen drehbaren Ultraschallsensor. Darüber hinaus stehen ein magnetischer Kompass, ein Gyroskop sowie ein Beschleunigungssensor zur Verfügung.
- Die Programmierung erfolgt in Java mit einer speziellen Klassenbibliothek und Laufzeitumgebung (Lejos).
|
|
Voraussetzungen
Die Arbeit richtet sich an Studenten, die sich mit Fragestellungen der Robotik befassen möchten.
Die Arbeit wird im Pervasive-Computing-Labor durchgeführt.
|