Autonome mobile Robots sollen sich in unbekannter Umgebung orientieren und dort einfache Aufgaben übernehmen.
Eine wichtige Größe ist hierbei die eigene Position (mit Ausrichtung), die ständig über Radsensoren ermittelt wird. Über Reibungsverluste
kann diese intern ermittelte Position aber von der tatsächlichen Position abweichen. Als Folge werden Informationen über die Umwelt falsch zugeordnet.
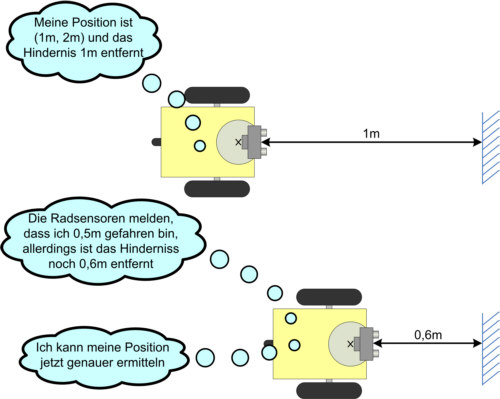
Zieht man weitere Sensoren heran (die selbst wiederum fehlerhafte Informationen zurückliefern können), kann man in Summe eine wesentlich genauere Position ermitteln. Als Beispiel (siehe Abbildung):
- Die Radsensoren melden eine bestimmte zurückgelegte Entfernung.
- Ein anvisiertes Hindernis ist aber nicht im selben Maße näher gekommen.
- Kennt man die Fehlercharakteristika beider Sensoren, kann man eine bessere Aussage über die eigene Position treffen.
In dieser Arbeit soll ein entsprechendes Korrekturverfahren konzipiert und realisiert werden. Das Verfahren soll auf einer realen Robot-Plattform zum Einsatz kommen.
Einige Randbedingungen sind hierbei:
- Bestandteil der Arbeit ist, einen Überblick über entsprechende Korrekturverfahren zu geben. Auf dieser Basis soll ein geeignetes Verfahren ausgewählt (und ggfs. modifiziert) werden.
- Der Robot-Aufbau ist im Wesentlichen vorgegeben (siehe Abbildung).
- Der Robot verfügt über interne Positionssensoren (Messung der Radumdrehung) und besitzt als wesentliche Hinderniserkennung einen drehbaren Ultraschallsensor. Darüber hinaus stehen ein magnetischer Kompass, ein Gyroskop sowie ein Beschleunigungssensor zur Verfügung. All diese Sensoren können zur Korrektur der Position herangezogen werden.
- Die Programmierung erfolgt in Java mit einer speziellen Klassenbibliothek und Laufzeitumgebung (Lejos).
Voraussetzungen
Die Arbeit richtet sich an Studenten, die sich mit Fragestellungen der Robotik befassen möchten.
Die Arbeit wird im Pervasive-Computing-Labor durchgeführt.
|
|